Статическая модель системы частотной автоподстройки частоты
Радиопередающие устройства (РПдУ) применяются в сферах телекоммуникации, телевизионного и радиовещания, радиолокации, радионавигации. Стремительное развитие микроэлектроники, аналоговой и цифровой микросхемотехники, микропроцессорной и компьютерной техники оказывает существенное влияние на развитие радиопередающей техники как с точки зрения резкого увеличения функциональных возможностей, так и с точки зрения улучшения ее эксплуатационных показателей. Это достигается за счет использования новых принципов построения структурных схем передатчиков и схемотехнической реализации отдельных их узлов, реализующих цифровые способы формирования, обработки и преобразования колебаний и сигналов, имеющих различные частоты и уровни мощности.
1. Статическая модель системы частотной автоподстройки частоты
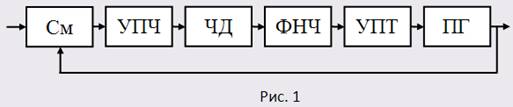
Система частотной автоподстройки частоты (ЧАПЧ) в своем основном применении известна как система автоподстройки частоты гетеродина (см. рис.1). Она предназначена для поддержания равенства промежуточной частоты и средней частоты амплитудно-частотной характеристики УПЧ. Требуемое значение промежуточной частоты задается переходной частотой fперех дискриминационной характеристики частотного дискриминатора ЧД. Типичный вид дискриминационной характеристики показан на рис. 2.
Если промежуточная частота равна переходной, то напряжение на выходе частотного дискриминатора равно нулю и частота гетеродина не изменяется.
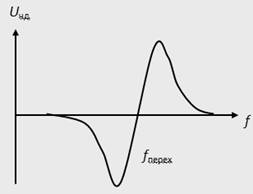
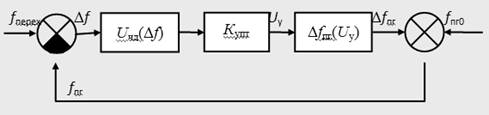
При отклонении промежуточной частоты от переходной появляется напряжение на выходе частотного дискриминатора, которое вызывает изменение частоты гетеродина так, чтобы уменьшилось отклонение промежуточной частоты. Дискриминационная характеристика описывается нелинейной зависимостью Uчд = Uчд(Df), где Df = f – fперех. Можно объединить перестраиваемый генератор, смеситель и УПЧ в один сложный перестраиваемый генератор, и тогда система ЧАПЧ примет вид, представленный на рис. 3.

Для определения характеристик системы в установившемся режиме составляется статическая модель. В ней отражаются только функциональные преобразования процессов. Статическая модель системы изображена на рис. 4.
При ее составлении учитывалось, что для постоянного воздействия коэффициент передачи ФНЧ равен 1, а частота перестраиваемого генератора fп г = fпг0 + Dfпг, где fпг0 – частота ПГ при управляющем напряжении, равном нулю, и Dfпг – приращение частоты перестраиваемого генератора, зависящее от управляющего напряжения. Суммирующее и вычитающее устройства можно заменить одним вычитающим, так как Df = fперех – fпг0 - Dfпг. Введем новую переменную - начальную расстройку Dfнач = fперех – fпг0, тогда Df = Dfнач - Dfпг Преобразованная статическая модель показана на рис.5.

Эта модель описывается системой алгебраических уравнений:
Uу =Купт U чд(Df), (1,а)
Df = Dfнач - Dfпг(Uу). (1,б)
Графическое решение этой системы уравнений показано на рис. 6,а. Уравнение (1,б) представлено семейством линий, зависящих от значения начальной расстройки. Значение расстройки в установившемся режиме Dfуст равно горизонтальной координате точки пересечения линий, а значение управляющего напряжения в установившемся режиме Uу уст – вертикальной координате этой точки. На рис. 6,б показана зависимость расстройки в установившемся режиме Dfуст от начальной расстройки. Для линии, отмеченной звездочкой *, показано, как определяется положение точки на зависимости Dfуст(Dfнач).Если увеличивать начальную расстройку от нуля, то будет увеличиваться и расстройка в установившемся режиме. Решение системы уравнений будет перемещаться по линии ОА. Это решение соответствует режиму эффективной автоподстройки, для которого Dfуст<

Это режим отсутствия автоподстройки. Начальная расстройка, при которой система ЧАПЧ выйдет из режима эффективной автоподстройки, называется полосой удержания. Если теперь увеличивать начальную расстройку, то режим отсутствия автоподстройки будет сохраняться до тех пор, пока линия 1,б не станет касательной к линии 1,а в точке С. При малейшем уменьшении начальной расстройки система ЧАПЧ перейдет в режим эффективной автоподстройки. Начальная расстройка, при которой система ЧАПЧ входит в режим эффективной автоподстройки, называется полосой захвата.
Режим, соответствующий решению системы алгебраических уравнений на участке АС, будет неустойчив. Это можно показать следующим образом. На спадающем участке дискриминационной характеристики тангенс угла наклона, равный коэффициенту передачи дискриминатора, отрицательный и поэтому обратная связь положительная. При положительной обратной связи система устойчива, если коэффициент передачи по петле обратной связи меньше единицы. Для точки D, находящейся на участке АС, модуль тангенса угла наклона линии 1,а больше модуля тангенса угла наклона линии 1,б: ½tga1½>½tga2½. Но tga1 = Кчд, а tga2 = =1¤Кпг. Следовательно, ½Кчд½>½1¤Кпг½ и ½КчдКпг½>1. Значит, состояние системы ЧАПЧ, соответствующее решению D, будет неустойчивым.
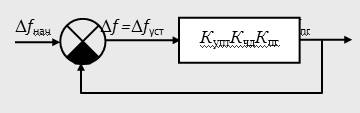
Для оценки качества работы в режиме малых расстроек используется коэффициент автоподстройки Кап = =Dfнач/Dfуст, который показывает, во сколько раз система ЧАПЧ уменьшает начальную расстройку. Его можно найти из статической модели, если заменить нелинейные зависимости линейными, т.е. Uчд(Df) = КчдDf и Dfпг(Uу) = Кпг Uу. Тогда нелинейная статическая модель преобразуется в линейную, показанную на рис. 7. Для нее Dfуст = Dfнач – Купт Кчд КпгDfуст. Отсюда Кап = 1+КуптКчдКпг = 1+K, где K – коэффициент передачи разомкнутой системы. В анализируемой модели дискриминационная характеристика описывается выражением:
Uчд(Df) = 1 ¤ (1 + (Df - Df0)2) – 1 ¤ (1 + (Df + Df0)2). (2)
Модель системы приведена на рис. 8. Операция возведения в квадрат реализуется блоком умножения. Перестраиваемый генератор считается линейным устройством. ФНЧ, УПТ и ПГ моделируются инерционным звеном с передаточной функцией К ¤ (1 + 0,1p).
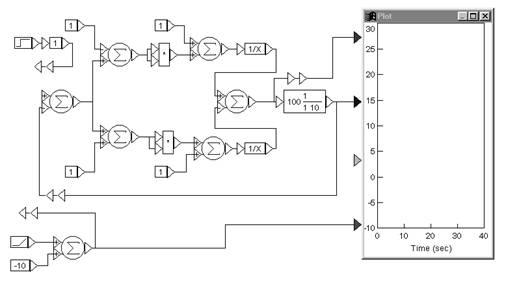
Рис. 8
Дополнительная информация по тематике лабораторной работы изложена в (1, §1.2), (2, §2.1, 7.1), (4, §2).
2. Устойчивость линейной системы авторегулирования
Устойчивость системы означает, что она принципиально может выполнять свои функции. Для линейных систем можно пользоваться следующим определением устойчивости: линейная система устойчива, если при ограниченном входном воздействии выходной процесс тоже ограничен.
Прямым методом анализа устойчивости является решение дифференциального уравнения, описывающего систему:

где ![]() и
и ![]() - соответственно выходной и входной процессы в системе.
- соответственно выходной и входной процессы в системе.
Устойчивость линейной системы не зависит от вида входного воздействия, и можно взять его любым, в том числе и нулевым, но удобнее принять x(t) = 1(t). В этом случае решением дифференциального уравнения будет переходная характеристика. И по виду ее можно определить устойчивость системы. Если переходная характеристика стремится к постоянному значению, то система устойчива. Если же переходная характеристика уходит в бесконечность, то неустойчива. Из решения дифференциального уравнения следует, что выходной процесс ограничен, если корни характеристического уравнения
anpn + an-1pn-1 +…+ a0 = 0
располагаются в левой полуплоскости.
При анализе устойчивости систем авторегулирования наиболее часто используется критерий устойчивости Найквиста. Согласно этому критерию замкнутая система устойчива при устойчивой разомкнутой, если годограф частотной характеристики разомкнутой системы не охватывает точки с координатами (-1, 0).Типовой вид годографа частотной характеристики разомкнутой системы, описываемой передаточной функцией
 , (3)
, (3)
приведен на рис.9.
Годограф начинается на действительной оси, так как на нулевой частоте коэффициент передачи разомкнутой системы является действительной величиной Кр(0) = К. С ростом частоты модуль коэффициента передачи Кр(w) уменьшается и вносится отрицательный фазовый сдвиг jр(w), поэтому вектор Кр(jw) поворачивается по часовой стрелке. При w = ¥ Кр(w) = 0 и jр(w) = - 3p¤2. Для устойчивой системы точка ( -1, 0) должна лежать вне фигуры, образованной годографом частотной характеристики и действительной положительной полуосью.
Если в разомкнутую систему входят интеграторы, то годограф частотной характеристики разомкнутой системы начинается в бесконечности. Такие системы называются астатическими. Количество интеграторов равно порядку астатизма. Для системы с одним интегратором, имеющей передаточную функцию
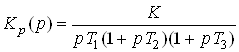 , (4)
, (4)
годограф начинается в третьем квадранте (рис. 10), а для системы с двумя интеграторами с передаточной функцией
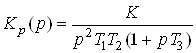 - (5)
- (5)
во втором квадранте, т.к. уже на нулевой частоте интегратор вносит фазовый сдвиг, равный p¤2.
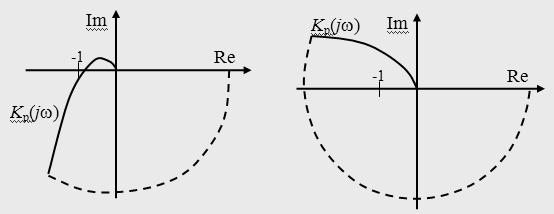
Для построения замкнутого контура в этих случаях требуется к годографу добавить столько четвертей окружности бесконечного радиуса, сколько интеграторов в разомкнутой системе. На рис. 10 и рис. 11 это добавление условно показано пунктирной линией. Замкнутая система с годографом Кр(jw), изображенном на рис. 10, устойчива, а на рис. 11 – неустойчива. Причем последняя является структурно-неустойчивой, т.е. неустойчивой при любом коэффициенте передачи разомкнутой системы.
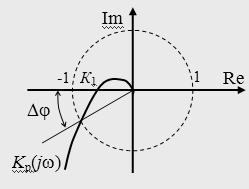
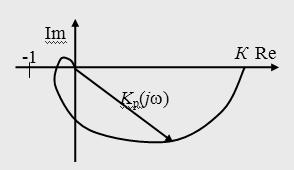
По годографу частотной характеристики разомкнутой системы можно оценить степень устойчивости. Для этого вводится понятие запасов устойчивости по усилению и по фазе. Запас устойчивости по усилению DК показывает, во сколько раз нужно изменить коэффициент передачи разомкнутой системы, чтобы замкнутая из устойчивой стала неустойчивой. Запас устойчивости по фазе Dj показывает, какой фазовый сдвиг нужно ввести в разомкнутую систему, чтобы замкнутая из устойчивой стала неустойчивой. На рис. 12 показано, как эти запасы определяются по годографу частотной характеристики разомкнутой системы. Запас устойчивости по усилению DК = =1¤К1, где К1 – коэффициент передачи разомкнутой системы на частоте, для которой jр(w) = -p.Запас устойчивости по фазе равен углу Dj между отрицательной действительной полуосью и линией, соединяющей начало координат с точкой пересечения годографа с окружностью единичного радиуса.
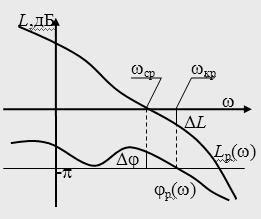
На практике удобнее пользоваться не годографом частотной характеристики, а амплитудно-частотной и фазочастотной характеристиками. И еще более удобно использовать логарифмические АЧХ и ФЧХ, т.е. ЛАХ и ЛФХ. Критерий Найквиста в этом случае формулируется так: замкнутая линейная система устойчива при устойчивой разомкнутой, если в области частот, где ЛАХ разомкнутой системы положительна, ЛФХ разомкнутой системы или не пересекает значения -p, или пересекает его сверху вниз и снизу вверх одинаковое количество раз. При монотонной ЛФХ разомкнутой системы устойчивость можно определить, сравнивая две характерные частоты: частоту среза wср, на которой ЛАХ пересекает ось частот, и критическую частоту wкр, на которой ЛФХ пересекает значение -p. Для устойчивой системы wкр>wср. Запас устойчивости по усилению DL определяется на критической частоте как расстояние от ЛАХ до оси частот, а запас устойчивости по фазе – на частоте среза как расстояние от -p до ЛФХ.
Логарифмические частотные характеристики позволяют легко и наглядно исследовать влияние параметров системы на ее устойчивость. Рассмотрим это на примере системы с передаточной функцией (3).
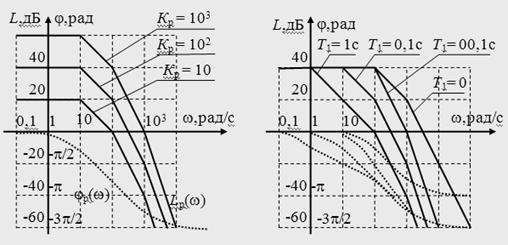
На рис. 14 изображены ЛАХ и ЛФХ разомкнутой системы для следующих значений постоянных времени: Т1 = 10-1 с, Т2 = 10-2 с, Т3 = =10-3 с и различных значений коэффициента передачи К = 10; 100; 103. При К = 10 замкнутая система устойчива. Запас устойчивости по фазе: 45 град, по усилению: 20 дБ. При К= 100 система находится на грани устойчивости и при К= 1000 неустойчива.
На рис.15 изображены логарифмические характеристики разомкнутой системы при К = 100, Т2 = 10-2 с, Т3 = 10-3 с и различных значений Т1: 1 с; 0,1 с и 0,01 с. Видно, что увеличение постоянной времени Т1 делает систему устойчивой и чем больше Т1, тем больше запасы устойчивости. Уменьшение Т1 приведет к неустойчивости системы. Наиболее неблагоприятной будет ситуация, когда все постоянные времени максимально близки друг к другу, т.е. при Т1 = (Т2 + Т3) ¤ 2. При дальнейшем уменьшении Т1 ЛФХ приподнимается в области частот, близких к частоте среза, и склонность системы к неустойчивости будет уменьшаться. При Т1 = 0 ЛФХ не будет пересекать значения -p, и система будет устойчивой при любом коэффициенте передачи.
Схема моделирования показана на рис. 16.
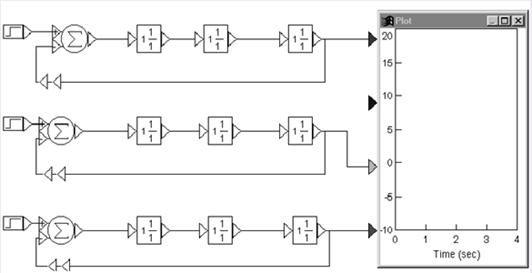
Рис. 16
Исследование устойчивости для удобства сравнения проводится на трех моделях, отличающихся структурой или параметрами.
Дополнительная информация по тематике лабораторной работы изложена в (1,§ 5.1, 5.3, 5.4, 5.5), (3,§2.1).
частотный автоподстройка дискриминационный
Заключение
Основным направлением развития систем связи является обеспечение множественного доступа, при котором частотный ресурс совместно и одновременно используется несколькими абонентами. К технологиям множественного доступа относятся TDMA, FDMA, CDMA и их комбинации. При этом повышают требования и к качеству связи, т.е. помехоустойчивости, объему передаваемой информации, защищенности информации и идентификации пользователя и пр. Это приводит к необходимости использования сложных видов модуляции, кодирования информации, непрерывной и быстрой перестройки рабочей частоты, синхронизации циклов работы передатчика, приемника и базовой станции, а также обеспечению высокой стабильности частоты и высокой точности амплитудной и фазовой модуляции при рабочих частотах, измеряемых гигагерцами. Что касается систем вещания, здесь основным требованием является повышение качества сигнала на стороне абонента, что опять же приводит к повышению объема передаваемой информации в связи с переходом на цифровые стандарты вещания. Крайне важна также стабильность во времени параметров таких радиопередатчиков - частоты, модуляции. Очевидно, что аналоговая схемотехника с такими задачами справиться не в состоянии, и формирование сигналов передатчиков необходимо осуществлять цифровыми методами.
Список литературы
1. Коновалов Г.Ф. Радиоавтоматика: Учебник для вузов. – М.: Радиотехника, 2003.
2. Первачев С.В. Радиоавтоматика: Учебник для вузов. – М.: Радио и связь, 1982.
3. Радиоавтоматика: Учебное пособие/ Под ред. В.А.Бесекерского. – М.: Высшая школа, 1985
4. Гришаев Ю.Н. Синтез частотных характеристик линейных систем автоматического регулирования: Метод. указания / РГРТА, 2000
5. Гришаев Ю.Н. Системы радиоавтоматики и их модели: учебное пособие.: Рязань,1977.
6. Гришаев Ю.Н. Радиоавтоматика. компьютерный лабораторный практикум/ РГРТА.: Рязань, 2004