Защита от средств слежения за автомобилями
Министерство образования Российской Федерации
Томский университет систем управления и радиоэлектроники
(ТУСУР)
Кафедра РЗИ
ЗАЩИТА ОТ СРЕДСТВ СЛЕЖЕНИЯ ЗА АВТОМОБИЛЕМ
Пояснительная записка к курсовой работе
по дисциплине «Инженерно-техническая защита информации»
Выполнили:
студенты группы 188
___________П.В. Дергачев
__________А.В. Дементьев
Руководитель:
Доцент каф. РЗИ
_____________А.П. Бацула
Томск
Реферат
Пояснительная записка, 48 страниц, 12 рисунков, 8 источников, 4 приложения СИСТЕМЫ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ, GPS, ПЕЛЕНГАЦИЯ, НАВИГАЦИОННОЕ СЧИСЛЕНИЕ, СИСТЕМА ПОИСКА И СЛЕЖЕНИЯ, ДИСКО-КОНУСНАЯ АНТЕННА.
Предметом данной курсовой работы являлось рассмотрение существующих систем и методов поиска, слежения, определения местоположения мобильных объектов. В работе были рассмотрены некоторые способы защиты от слежения и предложен собственный вариант защиты от слежения за автомобилем УАЗ – 462, на котором установлены скрыто GPS-приемник, принимающий сигнал со спутника и передатчик использующий канал сотовой связи.
Работа выполнена в текстовом редакторе Microsoft Word 97.
Томский Государственный Университет Систем Управления и Радиоэлектроники
Кафедра радиоэлектроники и защиты информации
УТВЕРЖДАЮ
Зав. кафедрой РЗИ, профессор
_____________ В.Н. Ильюшенко
«____»_____________ г.
ЗАДАНИЕ
на курсовую работу
по дисциплине «Инженерно-техническая защита информации»
Тема работы «Защита от средств слежения за автомобилями»
Исполнители – студенты гр. 188 Дергачев Павел Викторович, Дементьев Андрей Васильевич.
Цель работы: рассмотреть существующие системы и методы поиска, слежения, определения местоположения мобильных объектов, способы защиты от слежения, предложить собственный вариант защиты автомобиля УАЗ-462 при скрытой установке GPS-приемника и передатчика GSM.
Содержание: В работе рассматриваются системы и методы поиска, слежения, определения местоположения мобильных объектов, оборудование для поиска и слежения, способы защиты от слежения, предлагается собственный вариант защиты автомобиля УАЗ - 462, в ходе рассмотрения которого производится расчет некоторых параметров функционирования данной системы.
Источники разработки: 1.- В.И. Андрианов, А.В. Соколов Автомобильные охранные системы – Санкт-Петербург, BHV Арлит, 2000 г. – 272 с.;2.- http://www.ci.ru; 3.- http://www.globaltracer.ru;4.-http://skit.unets.ru;5.-http://www.sec.ru;6.- М.С. Жук, Ю.Б. Молочков Проектирование антенно-фидерных устройств – Москва, издательство «Энергия», 1966 г. – 648 с.;7.- А.С. Лавров, Г.Б. Резников Антенно-фидерные устройства – Москва, «Советское радио», 1974 г. – 368 с.;8.- А.Л. Драбкин, В.Л. Зузенко, А.Г. Кислов Антенно-фидерные устройства – Москва, «Советское радио», 1974 г. – 536 с.;
Руководитель курсовой работы Задание получили
Доцент каф. РЗИ А.П. Бацула _______________
_______________ _______________
Дата выдачи «___»_________ г. Срок сдачи работы «___»_________ г.
Содержание
Введение
1 Системы автоматического определения местоположения (АОМ)
1.1 Классификация и характеристика систем АОМ
1.2 Системы на базе методов приближения
1.3 Методы местоопределения по радиочастоте
1.3.1 Методы радиопеленгации
1.3.2 Методы радионавигации
1.4 Методы навигационного счисления
2 Навигационные системы поиска и слежения
3 Оборудование систем поиска и слежения
3.1 GPS-приемники
3.2 Комплекс аппаратно-программных средств GPS-Monitor
3.3 Комплексы радиоконтроля и пеленгования Савой
4 Предложение системы защиты от слежения за автомобилем
Заключение
Список использованных источников
Приложение А Классификация методов и AVL-систем
Приложение В Мозаика – блокиратор сотовых телефонов
Приложение С Схема расположения антенны
Приложение D Инструкция по правилам перевозки ценных грузов
Введение
В настоящее время во всем мире намечается значительный рост интереса к системам, обеспечивающим автоматизацию контроля за перемещением автотранспорта. Будучи на начальном этапе прерогативой спецслужб и небольшого числа коммерческих организаций, занимающихся транспортировкой особо ценных грузов, в настоящее время, благодаря совершенствованию технологий и снижению цен, эти системы становятся доступны и экономически эффективны для использования в самых разных отраслях, включая коммерческие грузоперевозки, общественный транспорт и цели рядового потребителя.
В последнее время широкое распространение во всем мире получили системы и комплексы технических средств определения местоположения подвижных объектов. Эти системы используются на море, суше и в воздухе для слежения за объектами, определения их местоположения, корректировки маршрута и т. д. Они различаются по методам определения координат объектов, способам передачи информации между подвижными объектами и диспетчерскими пунктами, логикой построения и т. п. Однако во всех этих системах должно выполняться условие — возможность для потребителя самостоятельно определять ее основные параметры:
Ø зону работы системы;
Ø тип транспорта, который требуется контролировать;
Ø частоту обновления информации о подвижном объекте;
Ø перечень задач, решаемых в системе.
Но существует также и проблема, которая крайне актуальна для государственных правоохранительных органов, частных структур безопасности и диспетчерских служб предприятий различных форм собственности - определение местоположения автомашин, других транспортных средств, ценных грузов злоумышленниками, то есть вторжение в личную жизнь, попытка незаконного получения информации конфиденциального характера или государственной тайны. Задачу по предотвращению подобной ситуации приходится решать в процессе управления и контроля перемещения подвижных объектов, обеспечения безопасности автомашин, сопровождения транспортных средств, ценных грузов и т. д.
1 Системы автоматического определения местоположения (АОМ)
Современные системы автоматического (автоматизированного) определения местоположения транспортных средств — AVL (Automatic Vehicle Location system), выполняющие эти задачи, автоматически определяют координаты транспортного средства в группе ему подобных по мере его перемещения в пределах определенной территории. Система AVL обычно состоит из подсистемы определения местоположения, подсистемы передачи данных и подсистемы управления и обработки данных.(1)
1.1 Классификация и характеристика систем АОМ
По территории охвата системы определения местоположения транспортных средств условно можно подразделить (рис. 1.1) на следующие зоны покрытия:
Ø глобальную, которая охватывает земной шар, материки или территории нескольких государств;
Ø региональную, ограниченную, как правило, границами населенного пункта, области, региона;
Ø локальную (зональную) — рассчитанную на малый радиус действия (территория города, области), что характерно в основном для систем дистанционного сопровождения и поиска угнанных автомобилей.
С точки зрения реализации функций местоопределения системы AVL характеризуются такими техническими параметрами, как точность местоопределения и периодичность уточнения данных. Очевидно, что эти параметры во многом зависят от зоны действия AVL -системы. Чем меньше размер зоны действия, тем выше должна быть точность местоопределения. Так, для локальных систем, действующих на территории города, считается достаточной точность местоопределения (называемая также зоной неопределенности положения) от 100 до 200 м. Некоторые специальные системы требуют точности до единиц метров, для глобальных систем бывает достаточно точности до единиц километров. Периодичность уточнения данных может колебаться от нескольких минут до часов.
Глобальная зона покрытия обычно требуется для контроля международных перевозок, и расстояния между подвижным объектом и диспетчерским пунктом могут быть в несколько тысяч километров. Поэтому наиболее приемлемое решение для реализации системы подобного масштаба — использование спутников: каналов связи. Системы спутниковой подвижной связи, применяемые для цели контроля подвижных объектов, в свою очередь, можно разделить на системы:
Ø на базе геостационарных спутников;
Ø на базе низко - и среднеорбитальных спутников.
Основная масса систем контроля дальних перевозок основана на использовании геостационарных спутников. Это системы Inmarsat, OmniTracs, EutelTracs, Prodat и другие. Рассмотрим некоторые из них более подробно.
Система Inmarsat, базируясь на геостационарных спутниках, обеспечивает передачу информации между подвижным объектом и диспетчерским пунктом на всей территории земного шара, за исключением приполярных областей. Время доставки информации в системе составляет 5—15 минут в зависимости от организации диспетчерского пункта. Для контроля дальних перевозок такое время доставки информации вполне приемлемо, и период обновления информации о состоянии контролируемого объекта выбирается обычно в 1 час.
Выпускается несколько видов абонентских терминалов, которые с учетом специфики применения отличаются функциональными возможностями. В комплект подвижного объекта обычно входит:
Ø спутниковая станция;
Ø совмещенная Inmarsat/GPS антенна;
Ø бортовой компьютер;
Ø набор датчиков.
Габариты мобильного комплекта таковы, что он без проблем устанавливается даже на легковой автомобиль. Бортовой компьютер обеспечивает автоматическую передачу навигационной информации на диспетчерский пункт по запрограммированной временной сетке или при возникновении нештатной ситуации (срабатывание датчика температуры, тревожной кнопки и т. д.). Точность местоопределения составляет около 100 м.
Система EutelTracs с точки зрения потребителя, имеет схожие с Inmarsat характеристики компонентов. Состав мобильных терминалов и функциональные возможности систем практически одинаковы, но они используют различные частотные диапазоны. Мобильный терминал системы EutelTracs по своим размерам больше подходит для установки на грузовые машины.
Системы на базе низкоорбитальных спутников, такие, например, как Iridium, Orbcomm, предоставляют те же услуги, что и геостационарные системы. Основное их отличие друг от друга состоит в том, что первые состоят из низкоорбитальных спутников с небольшой высотой орбиты (меньше 1000 км). Для потребителя это означает, что их спутниковые терминалы имеют меньшие размеры и невысокие цены.
Система Iridium имеет глобальную зону покрытия за счет большого количества космических аппаратов — 66. Она предполагает большой перечень услуг:
Ø телефонная связь;
Ø передача алфавитно-цифровых сообщений на пейджер;
Ø переадресация вызова;
Ø конференц-связь;
Ø передача факсимильных сообщений;
Ø голосовая почта и др.
Система Orbcomm предназначается, в основном, для автоматизированного сбора информации о состоянии объектов, предоставления услуг электронной почты, решения навигационных задач.
К системам, обеспечивающим региональную зону покрытия, относятся системы контроля подвижных объектов, в которых объекты не удаляются от диспетчерского пункта дальше фиксированного расстояния (обычно не более 1000 км). В этих системах требуется поддерживать голосовую связь между объектом и диспетчером, оперативно доставлять информацию о местоположении и состоянии транспортных средств. Достаточно условно в этот разряд можно отнести системы на базе:
Ø транковой (транкинговой) связи;
Ø сотовой связи;
Ø коротковолновой связи.
Системы на базе транковой связи могут покрывать значительные площади, позволяя осуществлять «автороуминг» и «автопатчинг», то есть в них, за счет связи отдельных ретрансляторов в единую логическую структуру, потребитель избавляется от необходимости заботиться о переключении радиочастотных каналов при перемещении в рамках всей системы. В мире и в России развернуты и эксплуатируются транковые системы различных стандартов: SmartTrunk, MPT 1327, LTR, SmartZone, EDACS и др.
Системы на базе сотовой связи все более завоевывают рынок России. Многие фирмы выпускают оборудование и предлагают законченные системы. Широкое применение этих систем сдерживают высокая цена бортового комплекта и проблемы перегрузки системы связи.
Наряду с тем, что у многих сложилось впечатление о ненадежности связи на коротких волнах из-за влияния множества факторов на ее качество, коротковолновая связь, тем не менее, позволяет осуществлять передачу данных по каналу с высокой степенью надежности и с достаточно высокой скоростью. Это основано на сочетании современных технологий и достаточного количества резервных радиочастот.
Наиболее интересны в этом направлении разработки австралийских фирм Coden и Barret. Радиостанции этих фирм имеют встроенный механизм автоматического поиска канала связи, обеспечивающий решение задачи нахождения канала наилучшего прохождения сигнала в течение всего сеанса связи. Для передачи цифровой информации предусмотрен встроенный модем.
Системы локальной зоны покрытия работают, как правило, в радиусе до 100 км и чаще всего используются для обеспечения внутригородских перевозок и поиска угнанных автомобилей. В таких системах могут использоваться системы космической, сотовой, транковой и коротковолновой связи отдельно друг о друга или в различных сочетаниях.
По своему назначению AVL можно разделить на системы:
Ø диспетчерские;
Ø дистанционного сопровождения;
Ø восстановления маршрута.
Диспетчерские системы — это системы, в которых осуществляется централизованный контроль в определенной зоне за местоположением и перемещением подвижных объектов в реальном масштабе времени одним или несколькими диспетчерами, находящимися в стационарных оборудованных диспетчерских центрах; это могут быть системы оперативного контроля перемещения патрульных автомашин, контроля подвижных объектов, системы поиска угнанных автомобилей.
Системы дистанционного сопровождения — это системы, в которых производится дистанционный контроль перемещения подвижного объекта с помощью специально оборудованной автомашины или другого транспортного средства; чаще всего такие системы используются при сопровождении ценных грузов или контроле перемещения транспортных средств.
Системы восстановления маршрута — это системы, решающие задачу определения маршрута или мест пребывания транспортного средства в режиме последующей обработки на основе полученных тем или иным способом данных; подобные системы применяются при контроле перемещения транспортных средств, а также с целью получения статистических данных о маршрутах.
В том случае, когда требование получения информации в реальном масштабе времени не является обязательным, одной из наиболее дешевых систем контроля подвижных объектов является использование бортового накопителя параметров движения транспортных средств. Последний работает в режиме «черного ящика», т. е. осуществляет запись координат точек маршрута движения с указанием времени их прохождения, а также фиксирует дополнительную телеметрическую информацию, например, температуру в рефрижераторе, расход топлива, факты открывания дверей фургона и т. д.
Для зональных диспетчерских систем идеальной может считаться получение данных о местоположении подвижного объекта до одного раза в минуту. Системы дистанционного сопровождения требуют большей частоты обновления информации.
Конкретные реализации AVL-систем часто включают в свой состав технические средства, обеспечивающие несколько способов определения местоположения.
Методы определения местоположения, используемые в AVL-системах, по классификации можно разбить на три основных категории:
Ø методы приближения (зоновые);
Ø методы навигационного счисления;
Ø методы определения местоположения по радиочастоте.(1,2)
Примерная классификация методов и на их основе систем AVL приведена в Приложении А.
1.2 Системы на базе методов приближения
Для определения местоположения подвижного объекта на территории города создается сеть контрольных зон. Это достигается с помощью использования достаточно большого количества дорожных указателей или контрольных пунктов (КП1 — КПn), точное местоположение которых в системе известно (рис. 1.2). Местоположение транспортного средства определяется по мере прохождения последним зон действия этих пунктов. Индивидуальный код каждого контрольного пункта передается при этом по радиоканалу в бортовую аппаратуру транспортного средства, которая, в свою очередь, через подсистему передачи данных передает эту информацию, а также свой идентификационный код в подсистему управления и обработки данных. Таким образом, реализуется метод прямого приближения. Данные о местоположении транспортного средства выводятся на экран мониторов диспетчерского пункта (возможно отображение на карте местности). Достоверность получаемой информации во многом зависит от количества и расположения контрольных пунктов.
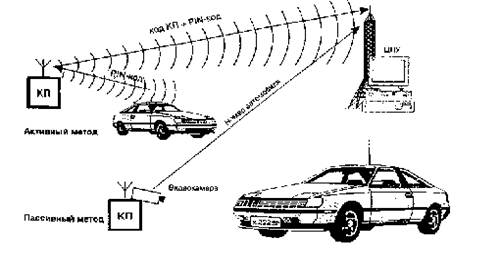
Рисунок 1.3 – Метод инверсного приближения
Однако на практике чаще используется инверсный метод приближения (рис. 1.3): обнаружение и идентификация транспортных средств осуществляется с помощью установленных на них активных, пассивных или полуактивных маломощных радиомаяков, передающих на приемник контрольного пункта свой индивидуальный код, или же с помощью оптической аппаратуры считывания и распознавания характерных признаков объекта, например, автомобильных номеров. Информация от контрольных пунктов передается далее в подсистему управления и обработки данных.
Очевидно, что для зоновых систем точность местоопределения и периодичность обновления данных напрямую зависит от плотности расположения контрольных пунктов на территории действия системы. Методы приближения требуют развитой инфраструктуры связи для организации подсистемы передачи данных с большого числа таких пунктов в центр управления и контроля, а в случае использования оптических методов считывания — требуют и сложной аппаратуры, используемой на всех контрольных пунктах, и поэтому весьма дороги при построении систем, охватывающих большие территории. В то же время, инверсные методы приближения позволяют минимизировать объем бортовой аппаратуры — радиомаяка, либо вовсе обойтись без устанавливаемой на автомашину аппаратуры. Основное применение данных систем — комплексное обеспечение охраны автомашин, обеспечение поиска автомашин при угоне. Примером подобной системы является система КОРЗ, обеспечивающая фиксацию приближения угнанной оборудованной автомашины к посту—пикету ГИБДД. Во многих зарубежных странах зоновые системы функционируют уже длительное время, как для нужд диспетчеризации общественного транспорта, движущегося по постоянным маршрутам, так и для нужд правоохранительных органов.(1)
1.3 Методы местоопределения по радиочастоте
Местоположение транспортного средства определяется путем измерения разности расстояний транспортного средства от трех или более относительных позиций.
Данную группу методов можно условно разбить на две подгруппы:
Ø радиопеленгация (обобщенно), когда абсолютное или относительное местоположение подвижного объекта определяется при приеме излучаемого им радиосигнала сетью стационарных или мобильных приемных пунктов;
Ø вычисление координат по результатам приема специальных радиосигналов на борту подвижного объекта (методы прямой или инверсной радионавигации).(1)
1.3.1 Методы радиопеленгации
С помощью распределенной по территории города сети пеленгаторов или с помощью мобильных средств пеленгации возможно отслеживание местоположения объектов, оборудованных радиопередатчиками-маяками.
На практике метод пеленгации, как наиболее дешевый в начальные годы становления систем спутниковой навигации (когда стоимость спутниковых приемников измерялась тысячами долларов), был опробован полицейскими и пожарными службами США и Канады. Результаты опытной эксплуатации системы показали, что ома может очень хорошо использоваться на открытой местности. Однако данная система имеет большие погрешности в условиях плотной городской застройки. Кроме того, стоимость инфраструктуры, необходимой для охвата значительной площади, весьма велика. В настоящее время этот метод используется очень редко.
Примером AVL-системы, основанной на методах радиопеленгации, можно считать систему ГИПС (новое название — СКИФ). Принцип работы системы заключается в следующем. Прием сигнала, излучаемого малогабаритным радиомаяком на подвижном объекте, осуществляется сетью стационарных радиоприемных центров, и по полученным данным производится с помощью математических операций определение местоположения автомашины с наибольшей вероятностью. Применение широкополосных сигналов с базой 103 –108 обеспечивает частоту обновления информации один раз в секунду в системе из 5000 объектов при высокой помехозащищенности. Точность местоопределения зависит от плотности размещения стационарной радиоприемной сети на территории города и может составлять единицы метров в режиме непрерывного слежения и корректировки данных по электронной карте.
Подобную систему с применением пейджеров двухсторонней связи и сети приемопередающих станций предлагает фирма «МегаПейдж». Широкополосный передатчик, установленный на автомашине, включается по сигналу стандартного пейджингового приемника либо по сигналу системы противоугонной сигнализации. Определение местоположения передатчика осуществляется с помощью сети базовых станций пейджинговой системы.
Примером системы на базе мобильных пеленгаторов является хорошо известная по телевизионным шоу-программам канала НТВ — система LoJack. Пеленгаторами данной системы оборудованы автомашины специального батальона дорожно-постовой службы ГИБДД и посты-пикеты ГИБДД на выезде из Москвы и ряда других городов.(1)
1.3.2 Методы радионавигации
Космическая радионавигация воплотила в себе новейшие достижения компьютерных и телекоммуникационных технологий. Симбиоз спутниковой системы позиционирования, современной радиосвязи и электронной картографии позволяет определять местоположение и скорость транспортного средства, вычислять расстояния, прокладывать маршруты и отслеживать их соблюдение, получать справки о картографических объектах. Сегодня работают две системы: американская Navstar и отечественная ГЛОНАСС. Использование обеих систем позволяет более точно определять координаты и повышает надежность функционирования.
Методы на основе радионавигации реализуются в системах AVL на основе импульсно-фазовых наземных навигационных систем (типа LORAN-C, Чайка) и спутниковых среднеорбитальных навигационных систем (СРНС) Navstar и ГЛОНАСС. Наилучшие точностные и эксплуатационные характеристики в настоящее время имеют спутниковые навигационные системы, в которых достигается точность местоопределения в стандартном режиме не менее 50—100 м, а с применением специальных методов обработки информационных сигналов в режиме фазовых определений или дифференциальной навигации — до единиц метров.
Самой известной является глобальная спутниковая радионавигационная система Navstar (Navigation System using Timing And Ranging) или GPS (Global Positioning System), созданная для высокоточного навигационно-временного обеспечения объектов, движущихся в космосе, воздухе, на земле и воде.
В ее состав входят навигационные спутники, наземный комплекс управления и аппаратура потребителей (пользователей). Применяемый в системе принцип состоит в том, что специальные приемники, установленные у потребителей, измеряют дальность до нескольких спутников и определяют свои координаты по точкам пересечения поверхностей равного удаления.
Дальность вычисляется по формулам, известным из школьных учебников, путем умножения скорости распространения радиосигнала на время задержки, при прохождении им расстояния от спутника до пользователя. Величина временной задержки определяется сопоставлением кодов сигналов, излучаемых спутником и генерируемых приемным устройством, методом временного сдвига до их совпадения. Временной сдвиг измеряется по часам приемника. Координаты спутников известны с высокой точностью. Для нахождения широты, долготы, высоты, исключения ошибок часов приемника достаточно решить систему из четырех уравнений. Поэтому приемник пользователя должен принимать навигационные сигналы от четырех спутников.
Скорость определяется по доплеровскому сдвигу несущей частоты сигнала спутника, вызываемому движением пользователя. Доплеровский сдвиг (Doppler shift) замеряется при сопоставлении частот сигналов, принимаемых от спутника и генерируемых приемником. Разумеется, все это происходит мгновенно и без какого либо участия пользователя.
Навигационные сигналы излучаются на двух частотах L-диапазона (полоса радиочастот 390-1580 МГц):
частота L1 - 1575,42 МГц;
частота L2 — 1227,6 МГц.
На частоте L2 излучаются сигналы с военным кодом Р(Y) с высокоточной информацией (precision — точный, или protected — защищенный), защищенным от имитационных помех.
Р-код представляет из себя последовательность псевдослучайных бистабильных манипуляций фазы несущей частоты (Carrier Frequency) с частотой следования, равной 10,23 МГц и периодом повторения в 267 суток. Каждый недельный сегмент этого кода является уникальным для одного из спутников GPS и непрерывно генерируется им в течение каждой недели, начиная с ночи с субботы на воскресенье.
На частоте L1 излучаются сигналы и с военным кодом P(Y), и с общедоступным гражданским кодом (Civilian Code), который часто называют C/A (Clear Acquisition – код свободного доступа). Прием сигнала по коду P(Y) обеспечивает работу в режиме PPS (Precise Positioning Service – высокая точность измерений). Сравнение времени прихода сигналов на частотах L1 и L2 позволяет вычислять дополнительную задержку, возникающую при прохождении радиоволн через ионосферу, что значительно повышает точность измерений навигационных данных.
Прием на частоте L1 с кодом C/A не позволяет определить ошибки, вносимые ионосферой. Структура кода C/A обеспечивает худшие характеристики в режиме SPS (Standart Positioning Service – стандартная точность измерений). Так, если в режиме PPS с вероятностью 0,95 ошибки измерения широты и долготы не превышают 22-23 метра, высоты 27-28 метров и времени 0,09 мкс, то в режиме SPS они увеличиваются соответственно до 100, 140 метров и 0,34 мкс. Среднеквадратическая ошибка определения долготы и широты в режиме PPS составляет не более 8 метров, а в SPS – не более 40 метров. Министерство обороны США, исходя из интересов национальной безопасности, осуществляет «искусственное» ухудшение точности в режиме S/A (Selective Availability – ограниченный доступ). Первоначально режим SPS был необходим для грубого определения пользователем своих координат при вхождении в код P(Y). В настоящее время уровень электроники, программного обеспечения и методов обработки навигационной информации позволяет осуществлять достаточно быстрый захват P(Y) без кода C/A, а также проводить высокоточные определения сигнала по фазе несущей. Кроме того, полностью отработанный наземный автоматический режим дифференциальной коррекции (Differential Positioning), позволяет в ограниченном регионе получать точное определение относительных координат взаимного расположения двух приемников, отслеживать сигналы одних и тех же спутников GPS. К примеру, штатные системы навигации транспорта, при использовании гражданского C/A кода определяют координаты автомобиля с точностью от 2 до 5 метров.
Отечественная навигационная система ГЛОНАСС (советская навигационная система Ураган) аналогична по своему построению американской, но имеет более высокую точность определения координат потребителя.
Впервые в России высококлассные GPS – системы, интегрированные с современными связными и картографическими комплексами, были поставлены компанией «Прин» в 1995 году в Инкомбанк, в специальные подразделения Министерства по чрезвычайным ситуациям, некоторые коммерческие структуры. Они были предназначены для оперативного контроля и управления транспортом в пределах города и региона. Кроме того, реализуются проекты для контроля за транспортом на любых расстояниях с использованием GPS и глобальной системы мобильной связи Inmarsat.
Достоинствами данного метода являются глобальность местоопределения, что позволяет применять его практически на любых территориях и трассах любой протяженности, хорошая точность, возможность определить положение объекта не карте местности, способность определять не только координаты, но и высоту, скорость и направление движения объекта, высокая степень совместимости с автоматизированными системами обработки информации. Не случайно у подобных систем самая широкая область применения. Это системы диспетчеризации городского и специального транспорта, обеспечения безопасности транспорта и материальных ценностей, работающие в реальном масштабе времени на территории города с десятками и сотнями подвижных объектов. Это системы контроля маршрутов транспорта, осуществляющего дальние междугородние и международные перевозки (с передачей информации о маршруте с помощью глобальных систем связи типа Inmarsat или с пассивным накоплении информации о маршруте с последующей обработкой).(1)
1.4 Методы навигационного счисления
Данные методы определения местоположения транспортных средств основаны на измерении параметров движения автомашины с помощью датчиков ускорений, угловых скоростей в совокупности с датчиками пройденного пути и датчиками направления и вычислении на основе этих данных текущего местоположения подвижного объекта относительно известной начальной точки. В целом данные методы могут использоваться в тех же системах, что и методы, основанные на радионавигации. Основное их преимущество по сравнению с методами радионавигации — независимость от условий приема навигационных сигналов бортовой аппаратурой. Не секрет, что на территории современного города с плотной застройкой высокими зданиями могут встречаться участки, где затруднен прием сигналов от наземных и даже спутниковых навигационных систем. На таких участках бортовая навигационная аппаратура не в состоянии вычислить координаты подвижного объекта. Приемные антенны радионавигационных систем должны размещаться на автомашинах с учетом обеспечения наилучших условий приема навигационных сигналов. Это делает их уязвимыми для злоумышленников в случае применения для нужд охраны автомашин или перевозимых ими грузов. Существующие методы камуфлирования (маскировки) приемных антенн достаточно сложны и дороги.
Методы счисления пути и инерциальной навигации свободны от этих недостатков, поскольку аппаратура полностью автономна и может быть интегрирована в конструктивные элементы автомашины с целью затруднения их обнаружения и защиты от умышленного вывода из строя. Недостатками методов навигационного счисления можно считать:
Ø необходимость коррекции параметров движения из-за накапливаемых ошибок измерения;
Ø достаточно большие, в целом, габариты бортовой аппаратуры;
Ø отсутствие доступной малогабаритной элементной базы для создания бортовой аппаратуры (акселерометров, автономных вычислителей пройденного пути, датчиков направления);
Ø сложность обработки параметров движения.
Наиболее перспективным направлением применения подобных методов можно считать их совместное использование с радионавигационными методами, что позволит скомпенсировать недостатки, присущие как одному, так и другому методу. Систему местоопределения с использованием данного метода предлагает ЗАО «Автонавигатор». В бортовом оборудовании системы используются:
Ø датчик пути, подключаемый к спидометру автомашины;
Ø датчик направления на основе феррозондов, измеряющих отклонение оси;
Ø автомашины от магнитного меридиана Земли;
Ø датчик ускорения (акселерометр), обеспечивающий устранение ошибок феррозондового датчика, возникающих из-за негоризонтального расположения объекта относительно поверхности Земли.
Корректировка ошибок счисления производится по цифровой векторной карте полилиний транспортной сети города, что позволяет достичь точности местоопределения до единиц метров. Имеется возможность использования элементов бортового оборудования совместно с приемником GPS.(1)
2 Навигационные системы поиска и слежения
Из-за сложного экономического положения охраны и недостаточного финансирования служб навигационного обеспечения отечественные космические системы определения координат различных потребителей отошли на второй план. Этим воспользовались зарубежные фирмы, между которыми развернулась жесткая борьба за овладение российским рынком.
В последнее время навигационные системы безопасности и поиска, в которых используются сотовая связь и технология GPS, становятся отдельным направлением в автомобильной электронике. Они не только демонстрируют «чудеса техники», но и позволяют снизить расходы на страхование и обеспечивают быстрый поиск угнанного автомобиля.
В настоящее время системы поиска автомобилей продолжают развиваться. В них используются новейшие достижения в области навигации и информационных технологий, возможности и достижения военно-промьшленного комплекса.
Структурно схемы автоматического контроля можно разделить на следующие функциональные подсистемы:
Ø определение координат объекта на местности;
Ø передача данных;
Ø обработка и отображение результатов.
Для определения координат объектов в различных системах используются следующие методы:
Ø автоматическая пеленгация кодированных радиомаяков, установленных на автомобилях;
Ø установка на автомобилях навигационных приемников систем GPS или ГЛОНАСС;
Ø прием специальной аппаратурой, установленной на автомобилях, маломощных сигналов маркеров, обозначающих контрольные точки маршрута.
Во всех службах, где внедряется спутниковая навигация, снижаются эксплуатационные затраты, повышаются безопасность перевозок грузов и дисциплина экипажей. GPS позволяет мобильным подразделениям оперативных и муниципальных служб стать более «боеспособными» без увеличения количества транспорта и личного состава за счет эффективного использования имеющихся ресурсов.
Системы спутниковой навигации, оборудование которых для потребителей в последние годы значительно подешевело, являются основным применяемым методом при поиске и слежении. В подавляющем большинстве случаев системы контроля за перемещением подвижных объектов используют приемники системы Navstar(GPS), так как они наиболее распространены и дешевы. Намечающаяся перспектива появления умеренных по цене двухсистемных приемников GPS/GLONASS может в ближайшее время «подключить» отечественную систему ГЛОНАСС. Она имеет на настоящий момент целый ряд очевидных преимуществ для активного использования в рассматриваемых системах контроля.
Ввиду того, что в системе Navstar до сих пор активирован режим Selective Availability («Ограниченная доступность»), искусственно ухудшающий точность определения координат приемниками гражданского применения, в системах, использующих GPS, часто используется метод дифференциальной коррекции, обеспечивающий повышение точности определения координат. Он основан на учете при вычислениях дополнительной информации (передаваемой по дополнительному каналу связи) о состоянии атмосферы и внесенных в сигнал спутников погрешностей.
Для передачи информации с мобильных объектов о местоположении может быть использован целый ряд методов. Наибольшее число систем использует для передачи данных радиостанции (обычные или транковые), оснащенные дополнительными модемами. Существуют также системы, использующие сотовую связь (AMPS в Америке и GSM в Европе) и спутниковые каналы связи (Inmarsat, Гонец).
Попробуем вы